This guide provides step-by-step instructions for assembling the Smart Motor V4..
Table of Contents
Introduction
The Smart Motor V4 also uses a custom Smart Motor board with ESP32C3. The main difference between V3 and V4 is you can power the Smart Motor with AAA batteries in V4. In the following steps you will find instructions on how to order the boards from Seeed Studio. You will also find the files to 3D print and parts you will need to order to build your own Smart Motors. Send us and email if you build one at milan.dahal@tufts.edu.
Preparing the parts
Smart Motors V4 has three printed circuit boards (PCBs) and a servo motor. The 3D printed part consists of a custom battery case that houses 4 AAA sized rechargable batteries. The case is held together with bolts and threaded nuts. Below are the instructions on where to find all the materials.Ordering Smart Motors PCBs.
In order to order the main PCBs from Seeed Studio:
- Go to Seeed Studio Fusion PCB (sign up/login required)
- Upload the gerber files: GerberFiles.zip
- Upload the instructions: Instructions.zip
- Upload the bill of materials: BOM.xlsx
Here are two additional PCBs that are required for V4 assembly.
- PCB that goes on the battery pack: BatterySidePCB.zip
- PCB that goes on the motor side: MotorSidePCB.zip
3D printing Smart Motor parts.
Print the following STL files. Make sure you print the Top and Box with PLA filament as we need to put heated inserts.






Ordering parts and materials.
Order the following components to complete the assembly.| Item | Quantity | Link |
|---|---|---|
| Servo motor | 1 | Amazon Link |
| PLA filament | As needed | - |
| M2 screw, 6 mm | 2 | McMaster Link |
| M2 screw, 4 mm | 6 | McMaster Link |
| M2 nut | 2 | McMaster Link |
| M2 threaded inserts | 6 | Amazon Link |
| Button cap | 1 | Amazon Link |
| Grove light sensor | 1 | Seeed Studio Link |
| I²C OLED display (if Seeedstudio cannot find the display) | 1 | Amazon Link |
| Pogo pins | 4 | Amazon Link |
| Schottky diode | 1 | DigiKey Link |
| 2-pin JST connector | 1 | Digikey Link |
| Battery connector (Positive terminal) | 1 | DigiKey Link |
| Battery connector (Negative terminal) | 1 | DigiKey Link |
| Battery connector (Positive-Negative terminal) | 3 | DigiKey Link |
| Rechargeable battery | 4 | Amazon Link |
Assembly Instructions
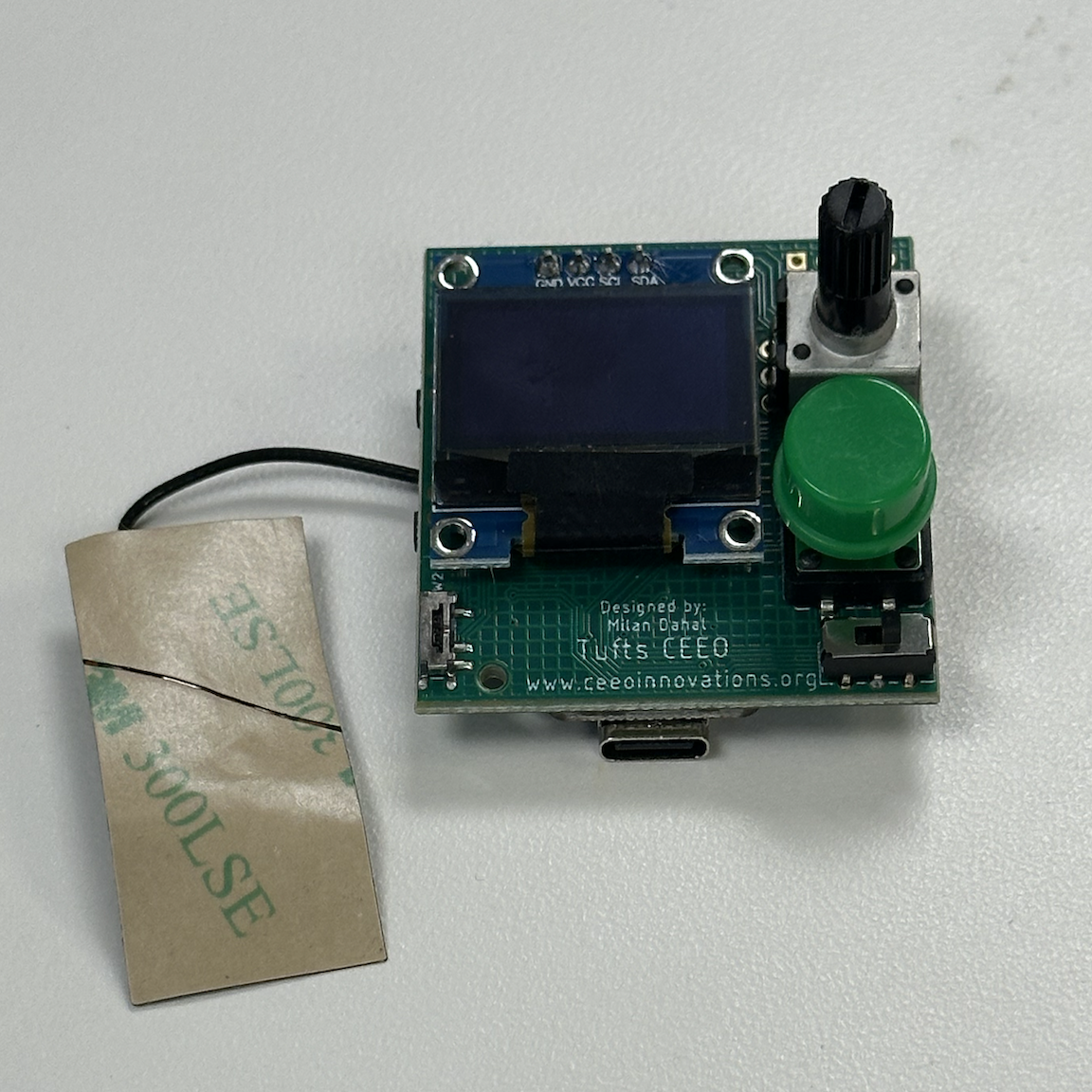
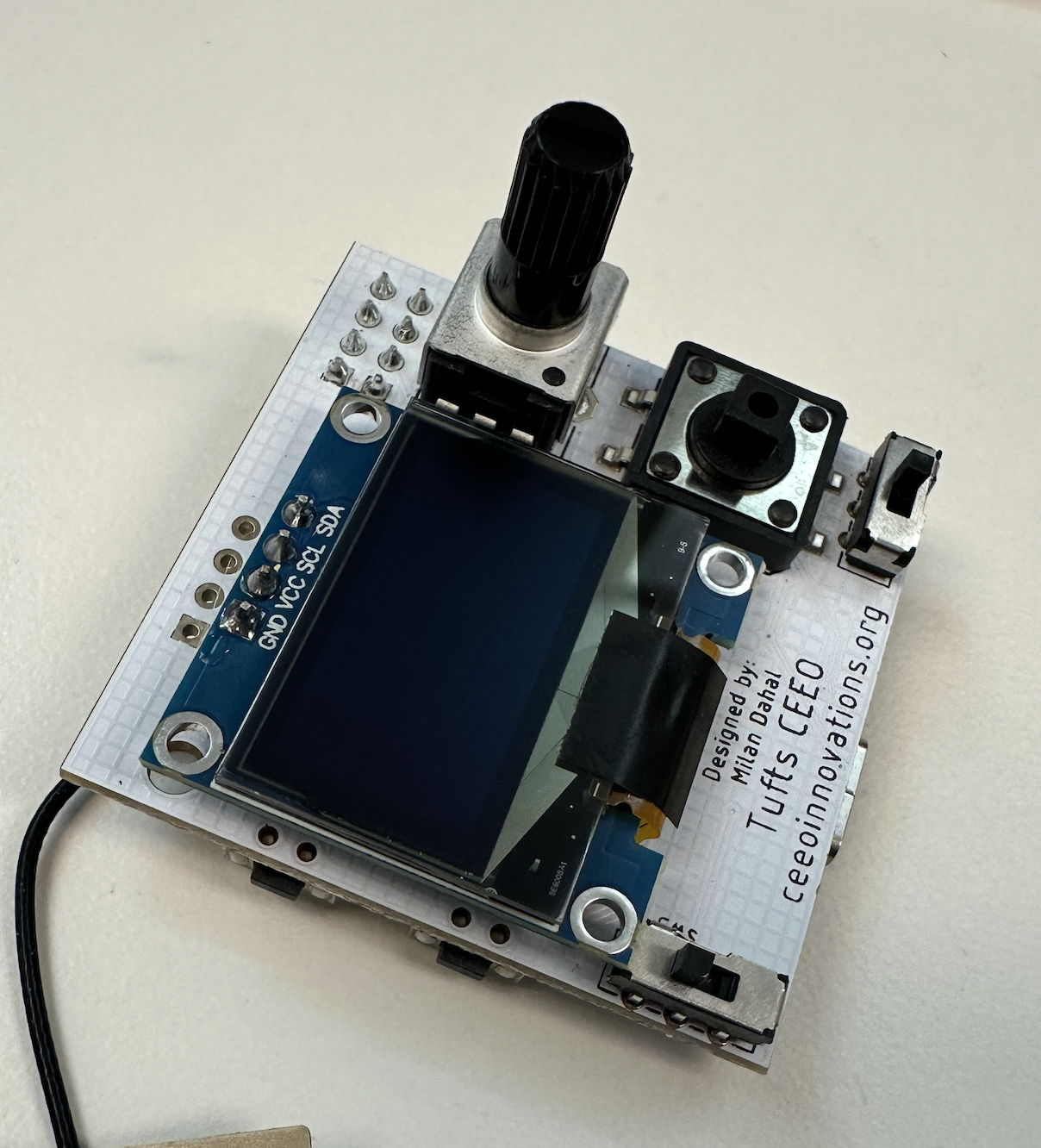
Step 1: Prepare the main PCB.
-
Solder the OLED screen to the Smart Motor board. Solder them in the second row of headers as shown in the image. (Skip this step if your board already has OLED screen.)
-
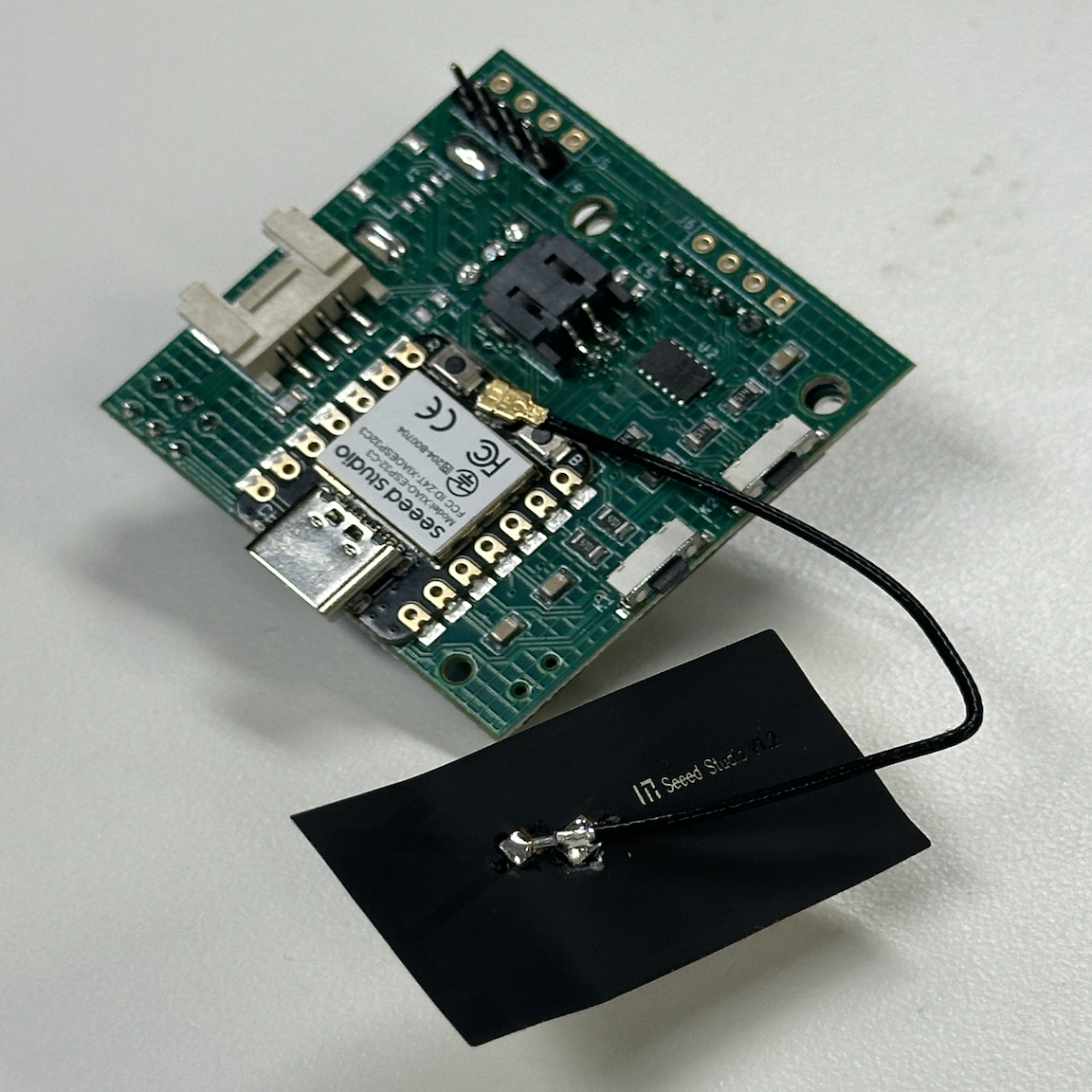
Attach the antenna to the Smart Motor board.
- Angle the side opposite to the wire more downward to help with insertion
- Press firmly until it snaps into place

-
Connect the servo motor to the motor pins on the Smart Motor board.
- Ensure the wires are inserted in the row labeled "BATT" (if using battery)
- The brown wire should be on the inside
- There should be one unused header on the outside
- You will need to bend the header pins to 90 degrees to fit inside the box (will update the design in the next iteration to avoid this step)

Step 2: Mounting the motor
-
Secure the servo motor inside the Box.
- Place a M2 nut inside the nut pocket in the Box - you might need to push it in with some force.
- Secure the motor with the motor mount using a 6mm M2 bolt.




-
Attach the wheel to the servo motor:
- Push the wheel onto the motor shaft
- The convex side should face toward the box and the concave side away
- This may require some force to attach
- Secure it with the bolt from the servo motor packet (not the screw)
Step 3: Build the battery case
-
To build the battery case, use the Battery case V4 print, the battery connectors and Battery Side PCB.
- Insert the battery connectors as shown in the image making sure that direction of batteries alternate.
- Solder the battery connector leads to Battery Side PCB on the other side.
- Use cutter to cut the extra leads from the PCB.






-
Insert the batteries in the battery case.
- Take 4 rechargeable Ni-MH batteries.
- Insert them into the battery case as shown. Double check the polarity of the batteries.
- Use the Bottom part to secure the batteries in the battery case.




Step 4: Attaching the battery PCB in the Box.
-
Solder the components on the PCB and secure it in the Box.
- Take 4 pogo pins, a diode, 2-Pin JST connector jumper cable, M2 nut, 6mm M2 bolt and the Box Side PCB.
- Solder the 4 pogo pins on the PCB. Make sure you solder on the side as shown in the image.
- Solder the diode on the PCB.
- Make sure the 2-Pin JST has red and black wires on the right side of the connector.




- Solder the wires to the PCB as shown. Double check the position of red and black wires.
- Insert the JST connector to the battery connector, check the positions of red and black wires again.
- Insert the PCB inside the box and secure with the 6mm M2 bold and M2 nut as shown.
- The pogo pins should poke out of the holes in the back.




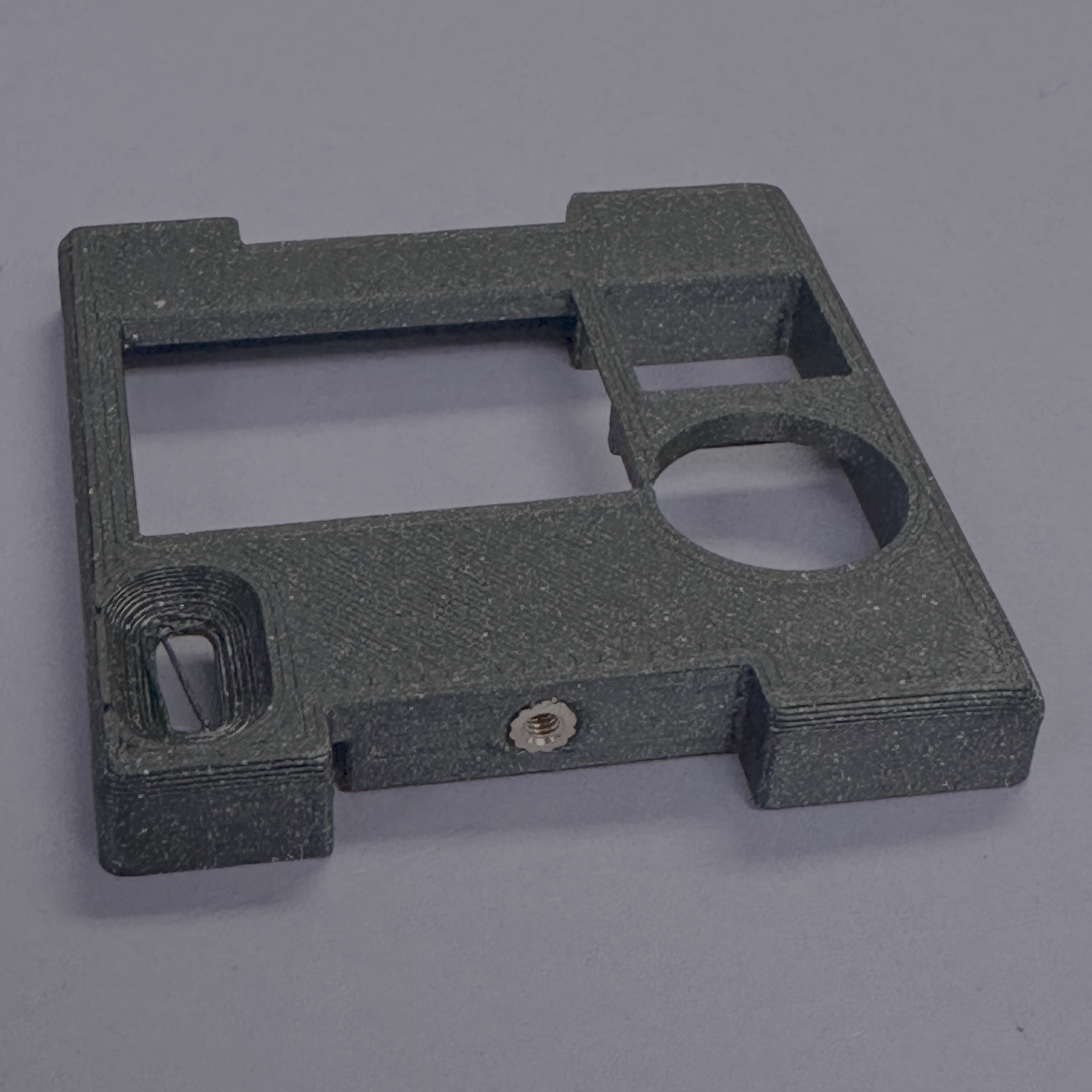
Step 5: Threaded inserts and final assembly.
-
Use a soldering iron to insert the threaded inserts into the two holes on the TOP as well as four holes on the BOX.

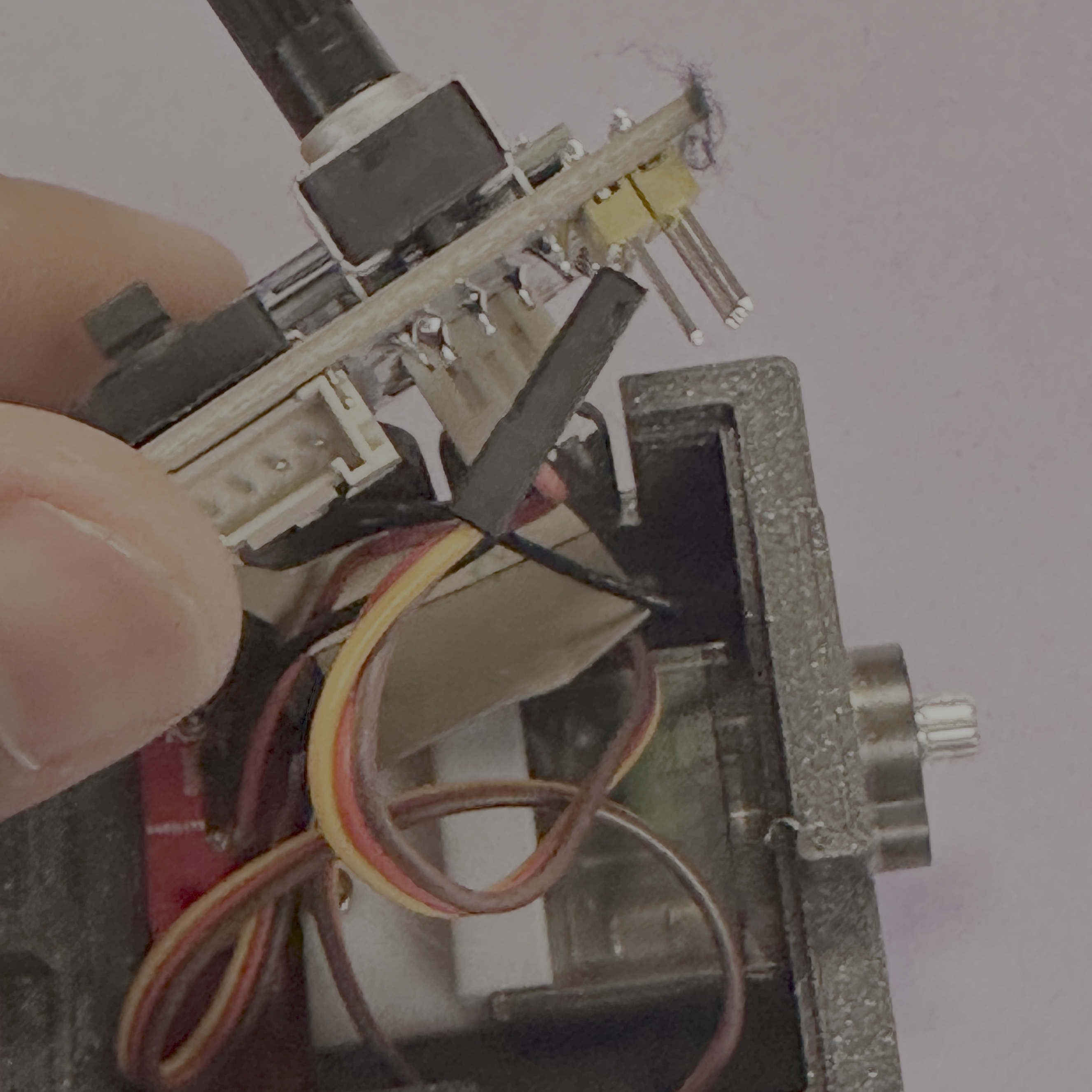
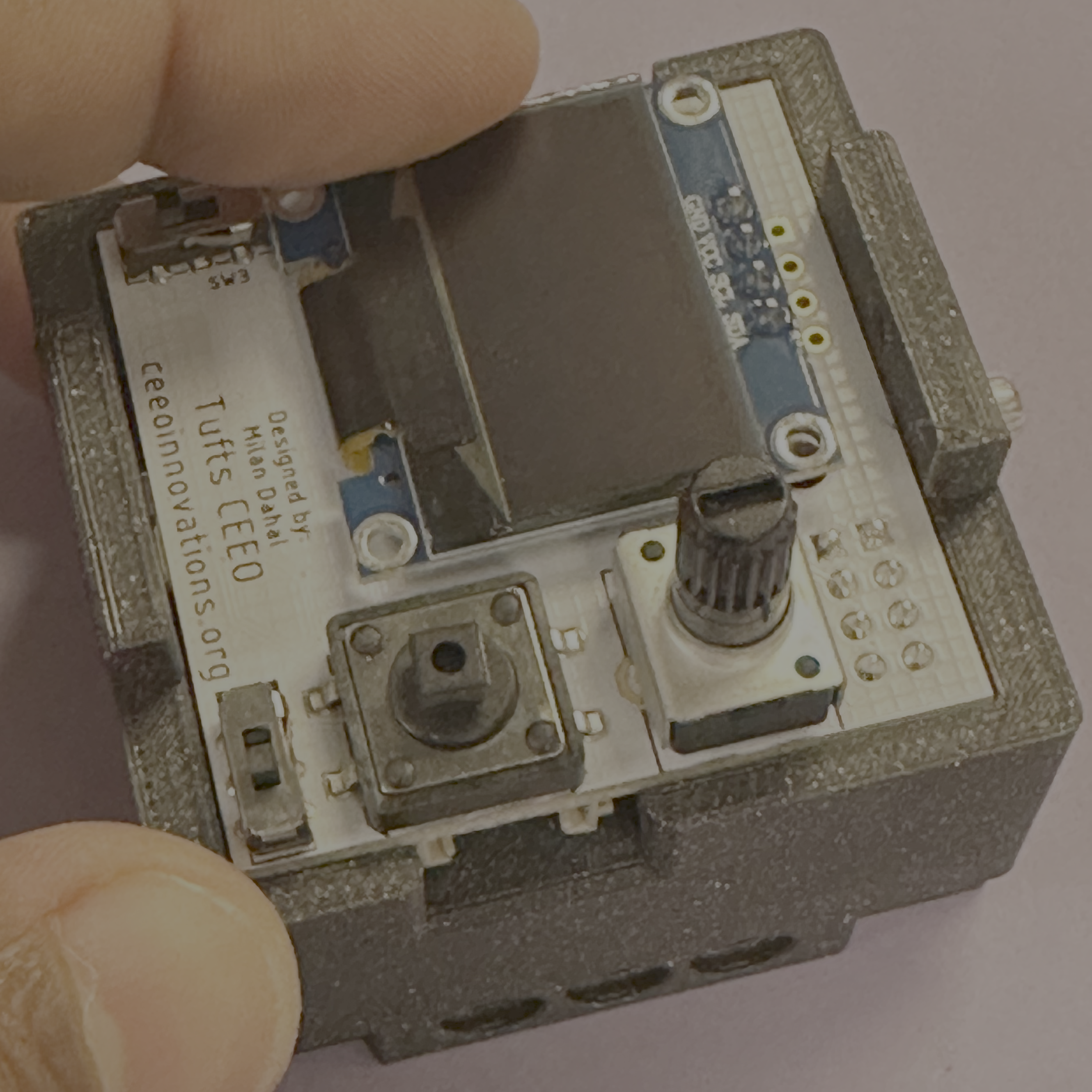
-
Arrange the electronics:
- Stuff the wire and antenna into the box
- Secure the Smart Motor board so it sits flush. If you feel resistance, first bend the headers connecting to the motor almost 90 degrees as shown below and check the wires.
- Set the sensor switch to analog by flipping the switch toward the right.
-
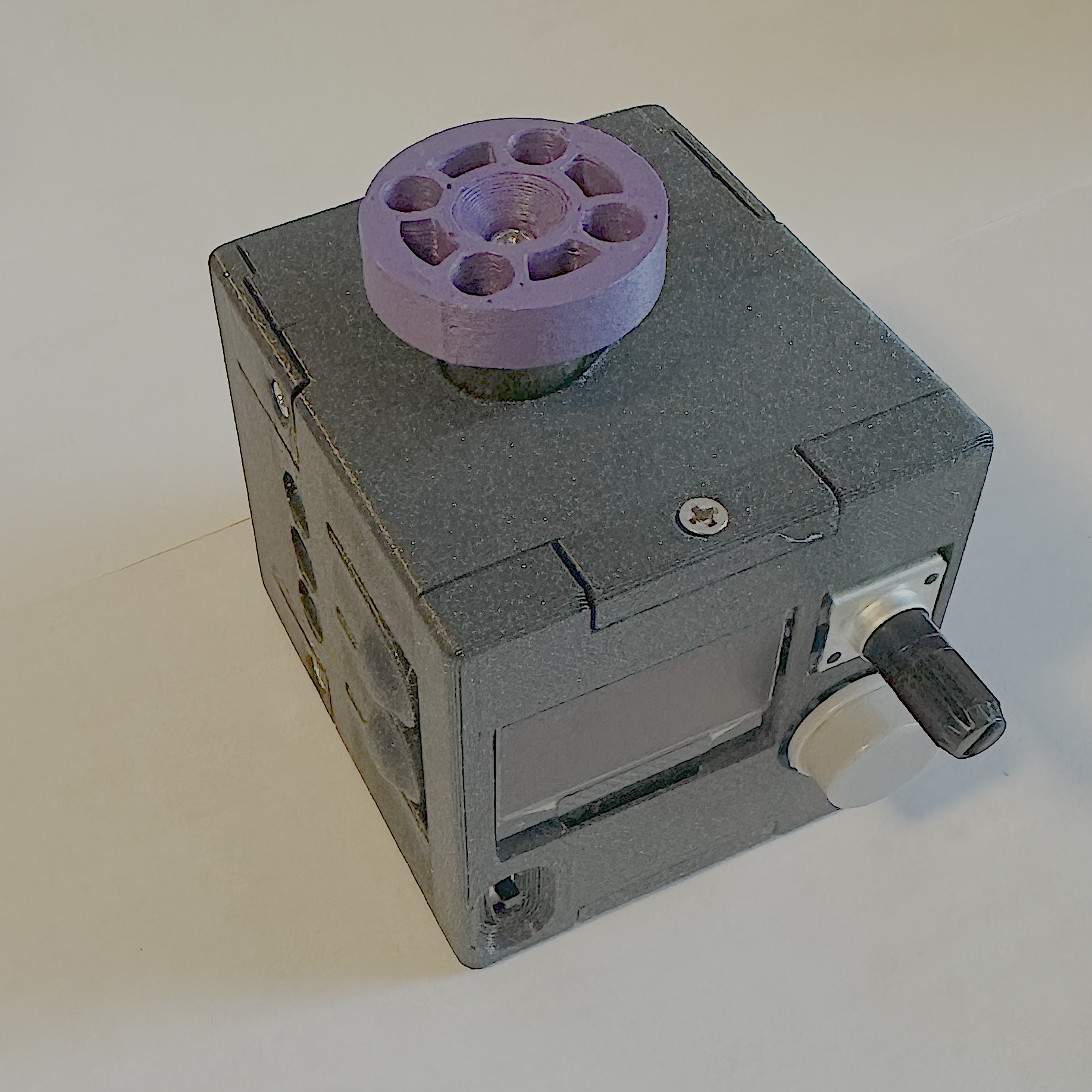
Assemble everything:
- Take the assembled box and battery case parts.
- Connect the two halves together and secure with 4 4mm M2 bolts.
- Remove the protective film from the screen and place the Top and secure with 2 4mm M2 bolts.
- Attach the button cap to finish the assembly process.




Time Estimates
| Task | Estimated Time |
|---|---|
| 3D printing | 6 hours |
| Manual assembly | 10 minutes |
Programming Your Smart Motor
Use the Smart Motor Update Portal to flash micropython firmware and to upload the code on your Smart Motor.This guide is maintained by the Smart Motors team. For questions or support, please email us. Find our contact info in our Contact Us page.